









Overview
The TB6600 Motor Driver is a stepper motor driver, known for its high-performance and durability. Rated for 9 to 42V DC with an output current of 0.5 to 4A it is designed to drive both 4-wire and 6-wire stepper motors, this driver is perfect for applications requiring precision, speed and direction control.
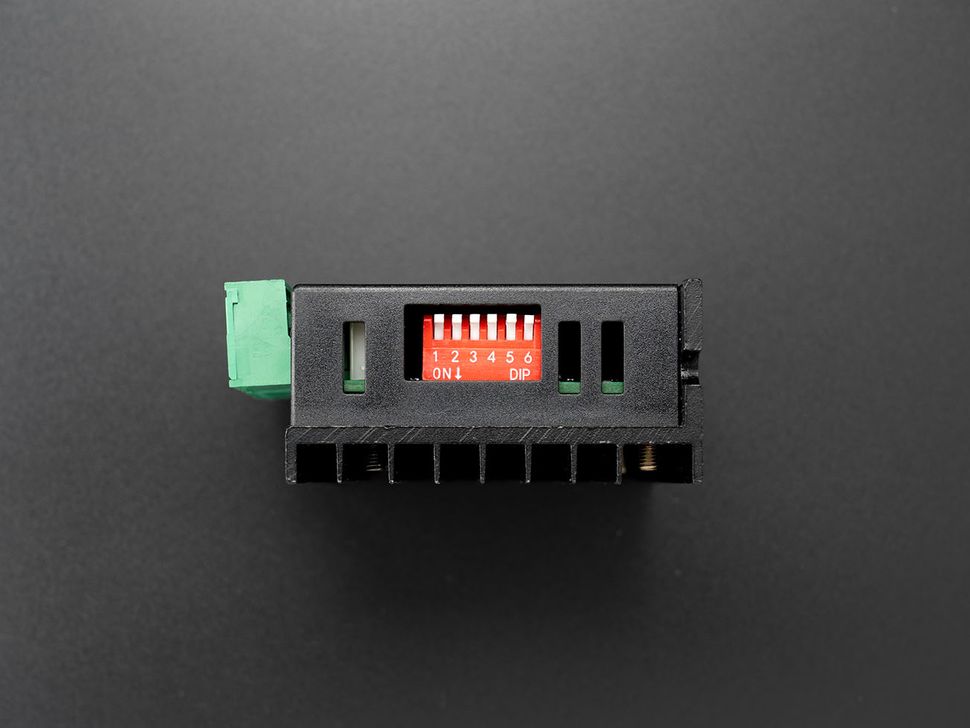
It offers 7 modes of microstepping (1, 2 / A, 2 / B, 4, 8, 16, 32) along with 8 modes of current output control (0.5A, 1A, 1.5A, 2A, 2.5A, 2.8A, 3.0A, 3.5A) which can be set using the 6 DIP switch on the right side.
The adjustable current control lets you set the maximum output current helps in reducing motor heating and power consumption. Its advanced chopping algorithm ensures smooth and quiet motor operation, while the built-in thermal shutdown and under-voltage lockout provide additional protection.
Its advanced features and robust design, it's ideal for 3D printers, CNC machines, and robotics projects.
Specifications
Key Features:
| Input Current | 0 to 4A |
| Output Current | 0.5 to 4.0A |
| Control Signal | 3.3 to 24V |
| Power (MAX) | 160W |
| Micro Step | 1, 2/A, 2/B, 4, 8, 16, 32 |
| Temperature | 10~45℃ |
Pinout
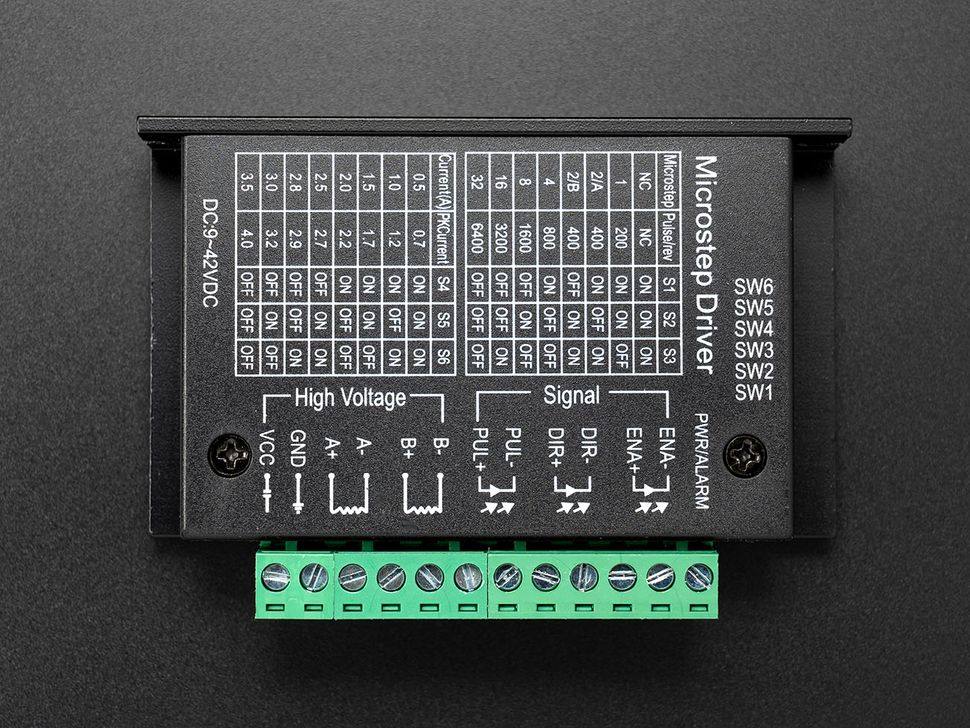
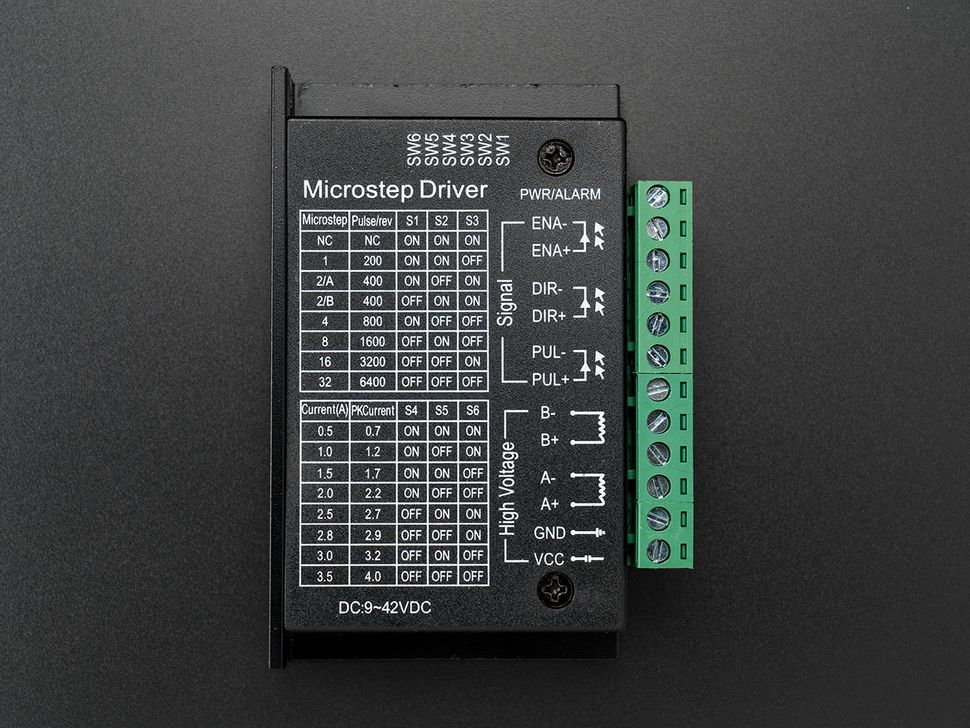
TB6600 Motor Driver Pinout
| SIGNAL | |
| ENA- | Enable - |
| ENA+ | Enable +5V |
| DIR- | Direction - |
| DIR+ | Direction +5V |
| PUL- | Pulse - |
| PUL+ | Pulse +5V |
| HIGH VOLTAGE | |
| B- | Coil Wire 1 |
| B+ | Coil Wire 1 |
| A- | Coil Wire 2 |
| A+ | Coil Wire 2 |
| GND | Ground |
| VCC | 9V to 42V DC |
Settings
Microstep Driver settings using the 6 DIP switch for microstep and current limit.
| MICROSTEP | PULSE/REV | S1 | S2 | S3 |
|---|---|---|---|---|
| NC | NC | ON | ON | ON |
| 1 | 200 | ON | ON | OFF |
| 2/A | 400 | ON | OFF | ON |
| 2/B | 400 | OFF | ON | ON |
| 4 | 800 | ON | OFF | OFF |
| 8 | 1600 | OFF | ON | OFF |
| 16 | 3200 | OFF | OFF | ON |
| 32 | 6400 | OFF | OFF | OFF |
Do not change the DIP switches when the driver is powered ON. Turn off the driver before changing the switches.
| Current (A) | Peak Curr. | S4 | S5 | S6 |
|---|---|---|---|---|
| 0.5 | 0.7 | ON | ON | ON |
| 1.0 | 1.2 | ON | OFF | ON |
| 1.5 | 1.7 | ON | ON | OFF |
| 2.0 | 2.2 | ON | OFF | OFF |
| 2.5 | 2.7 | OFF | ON | ON |
| 2.8 | 2.9 | OFF | OFF | ON |
| 3.0 | 3.2 | OFF | ON | OFF |
| 3.2 | 4.0 | OFF | OFF | OFF |
Connections & Code
High Voltage
- VCC: Connect it to a 9V to 42V
- GND: Connect it to the power supply ground.
- A+ & A- : A pair of wires from one of the coils of the motor gets connected.
- B+ & B- : A pair of wires from other coil of the motor gets connected.
A+, A- and B+, B- are the connections for the 4 wire bipolar stepper motor.
Signal
Connections for Arduino UNO
- ENA- Connect it to GND
- DIR- Connect it to GND
- PUL- Connect it to GND
- ENA+ Connect it to Pin 2
- DIR+ Connect it to Pin 4
- PUL+ Connect it to Pin ~5
Code
Before we move into coding, first we need to install the AccelStepper library written by Mike McCauley in the Arduino IDE.
You can install this library by directly going to Tools > Manage Libraries which opens the Library Manager. In the library manager search for AccelStepper using the search bar and click on the install button to install the latest version of the AccelStepper library.
#include
#define dirPin 4
#define stepPin 5
#define motorInterfaceType 1
#define enablePin 2
AccelStepper stepper = AccelStepper(motorInterfaceType, stepPin, dirPin);
void setup() {
stepper.setEnablePin(enablePin);
stepper.setMaxSpeed(1000);
stepper.setAcceleration(500);
stepper.enableOutputs();
}
void loop() {
//Move to 4000
stepper.moveTo(4000); //Set the target position
stepper.runToPosition(); // Moves the motor (with acceleration/deceleration) to the target position
delay(1000);
// Move back to zero:
stepper.moveTo(0);
stepper.runToPosition();
delay(1000);
}
Opps
Sorry, it looks like some products are not available in selected quantity.
Reviews
No reviews have been written for this product.